Lock Be Gone....... Robot
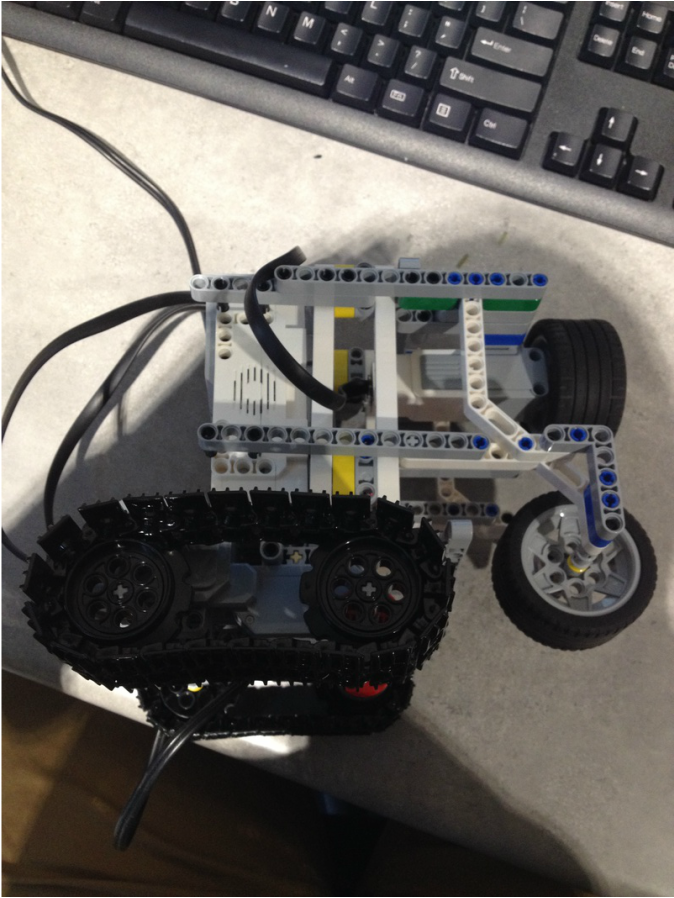
side view of the robot with the wheel on top to access the lock. what worked well was the track as it was able to move the robot left, right, forward and backwards. the structure was very well built but the only downfall was that the wheel was to high on the robot
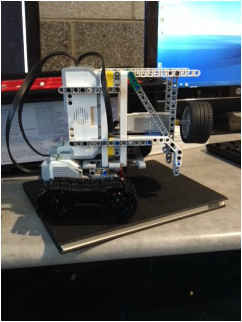
areal view of the robot
left side view of the robot

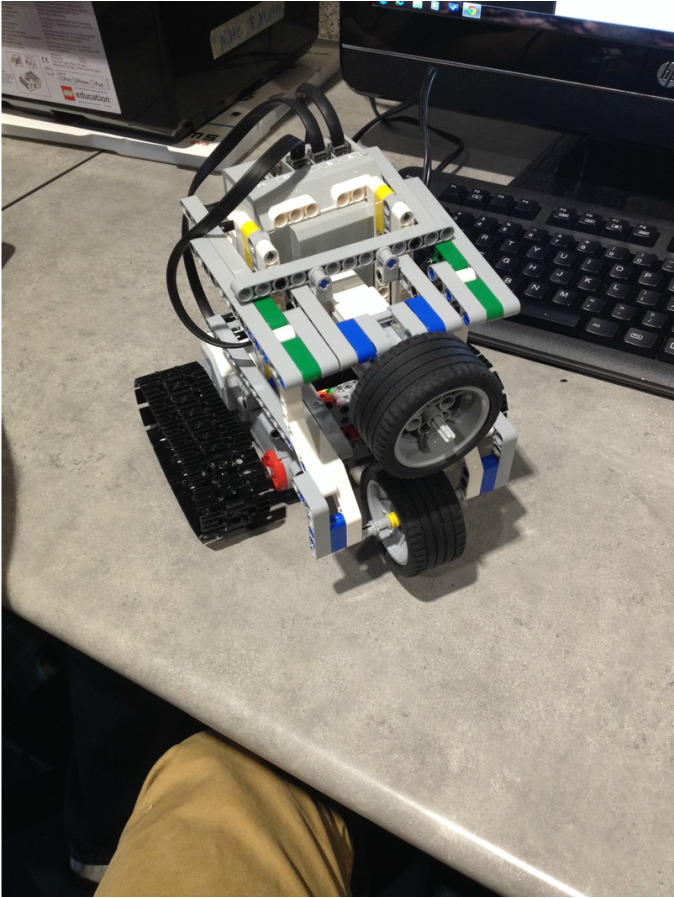
The new prototype has a mew front end where the motor is lower than the previous robot. in addition to this the motor tracks have been tightened which allows it to move more efficently.

Front end of the robot
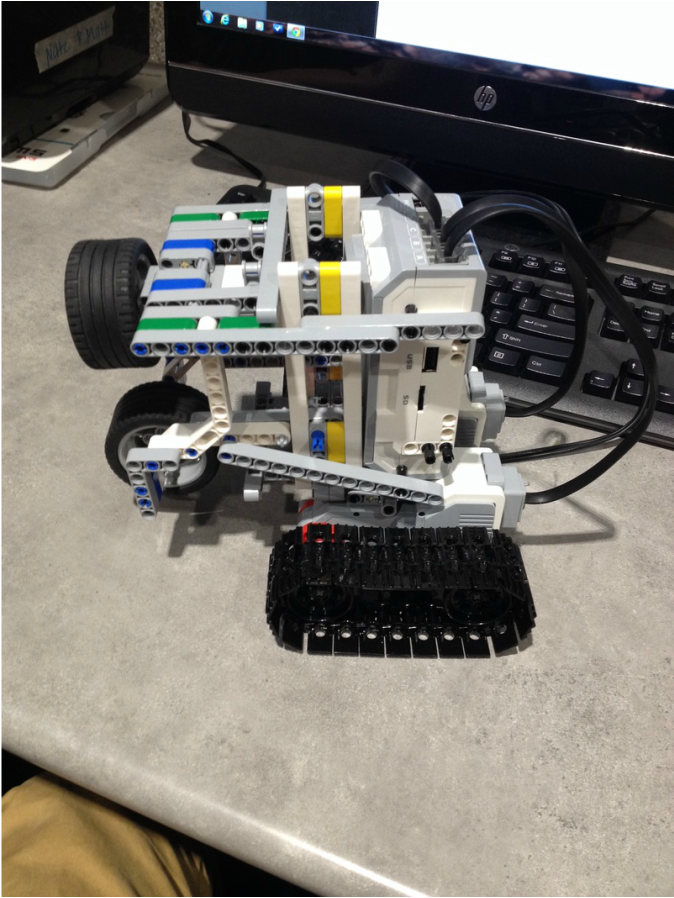
 Left side of the robot
Left side of the robot
