Line Follower Robot
1. State the assignment (problem/project) in your own words.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the
research you did.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
4. Describe the final output / product in detail: (what are we looking at?
What we are looking here is a robot that is capable of following a line laid out on the floor.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
- The assignment is to follow the white tape that is put on the ground and to make sure it follows it the whole way.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the
research you did.
- That our robot will need to have a working light sensor so that it follows the white tape, the black table will give the robot the area to turn around and will readjust to the tape.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
- We will make the robot travel the full length of the tape, and will stop at the end of tape so it will be successful.
4. Describe the final output / product in detail: (what are we looking at?
What we are looking here is a robot that is capable of following a line laid out on the floor.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
- we received very good feedback and no comments were no negative
- We learned how to build the robot with new kits that include metal frames/pieces and more electronic pieces as well.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
- i would change nothing because we were very successful in the initial build and the robot did very well
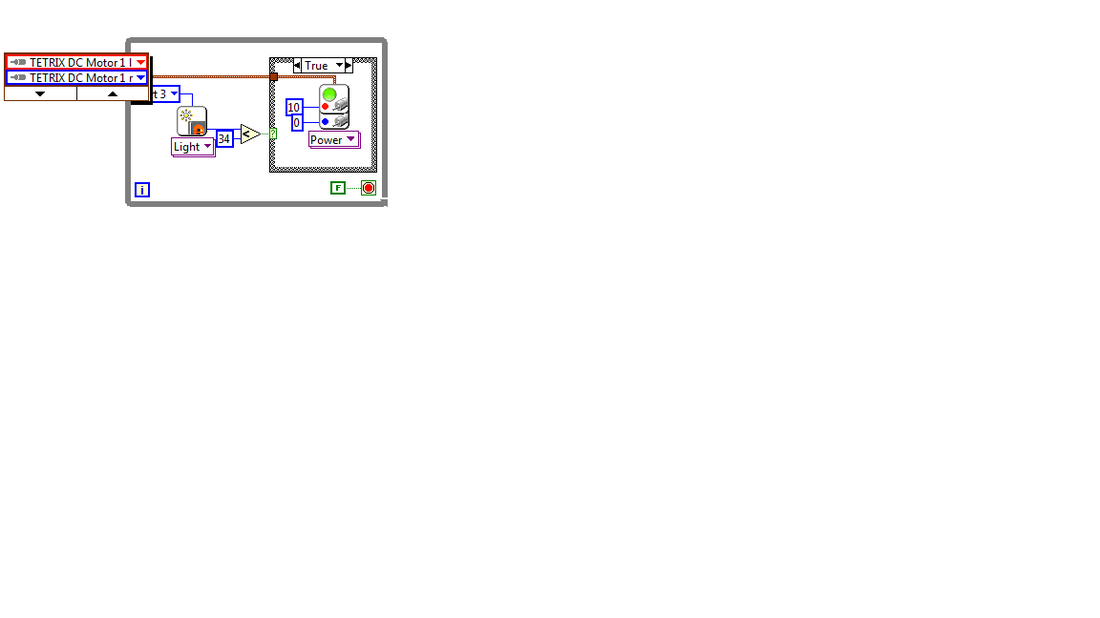
This is the program used to control the robots moments during the line follower


